edge开源版产品手册

欢迎
欢迎查阅ROVMAKER EDGE(6推、8推)使用手册,为了让您更好地使用本产品,请在第一次操作之前, 认真阅读本手册,并严格按照操作规范使用本产品。
公告

您的EDGE水下机器人的设计和配置可能与本手册中的不同,具体的操作细节有所区别,不必完 全参照手册进行操作。
产品规格和手册在不断地修改和改进,恕不另行通知。
在法律允许的最大限度内,在任何情况下,本公司不对任何特殊的,附带的或H接的损失承担责任,无论该损失由何种原因引起。
该产品和文档为常州一粟水下机器人科技有限公司版权所有。
注册商标名称为ROVMAKER。该文档的使用需要通过授权,而非通过出售,并且只能依据该 产品附带的或本文件中提出的授权协议来使用或复制,严禁擅自挪用。
在没有经过预先同意的情况下,该文档中的任何部分均木允讦在公共文件服务器中复制或保存, 或者以任何格式或方式,包括电子、手工、复印、记云、扫描、数字化以及其他方式进行转移。
针对个人应用而言允许打印该手册。
警告
*如本手册中所述,在任何情况下灵产不当可能会造成人身伤害,后果自负。
*注意推进器没有完全安全防护措施,以防止螺旋桨旋转造成人身伤害。
*注意锂电池充电过程中需要有人在一旁,以防任何意外造成的损失。
*小心接线和供电,以防短路或其他原因造成损坏。
*保修不包括任何直接或间接人为操作失误造成的损坏,包括按照手册操作产生的损坏,不必完全按照手册进行操作,该手册仅供参考。
开箱
产品构造
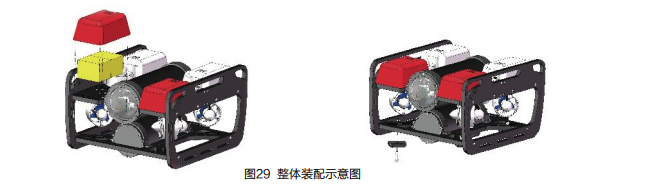
EDGE是典型的开架式结构,包括两个舱体分别为电源舱和电子舱,共有六只推进器(目前已经推出8推版本),固体浮力材料和铅块配重分别位于最上部和最下部。

包装构造
打开纸箱取出防护箱后,依次取出共三层内衬。
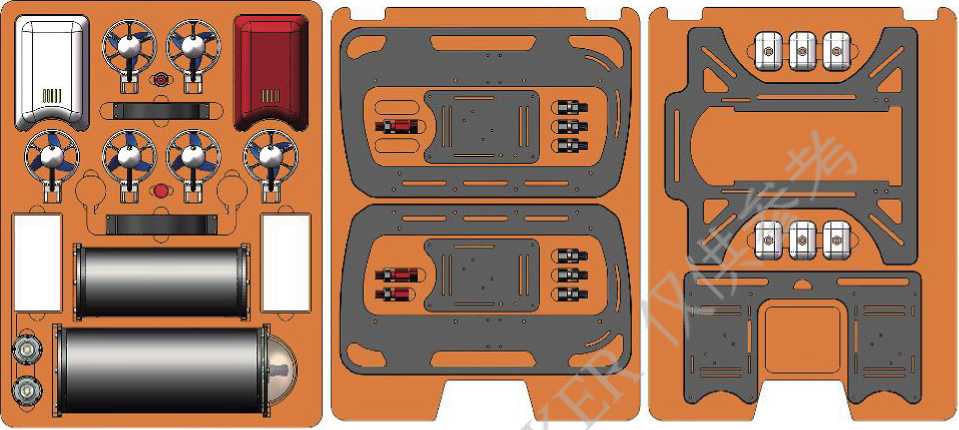
零件清单
根据订单情况参考零件清单检查配件是否齐全。下图3为零件清单列表
| 序号 | 名称 | 数量 | 型号 | 备注 |
| 1 | HDPE框架 | 单层1套 | 灰色表面喷砂 | 高密度聚乙烯板机加工 |
| 2 | 半圆形舱体固定扣环 | 2只110外径,2只90外径 | 黑色氧化铝合金 | |
| 3 | 推进器总成 | 3只正桨,3只反桨 | 30a电调1m线长 | 正反转,2kg推力 |
| 4 | 水下照明灯 | 2 | 铝合金,15w | 包含固定座,1500流明 |
| 5 | 穿线螺丝 | 4个空心,2个实心 | 黑色铝合金 | 配套密封圈 |
| 6 | 水密接插件 | 2套4芯,2个4芯堵头 | 300米深度耐压 | |
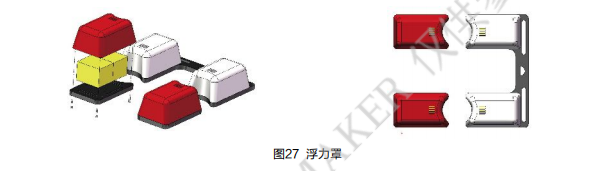
| 7 | 固体浮力材料 | 8块浮材,2个红罩,2个白罩 | 300米耐压 | 吸水率<5%压缩强度6.5Mpa |
| 8 | 配重块 | 6个200g | 铸造铅 | 铅表面包覆 |
| 9 | 法兰 | 2个110外径,2个90外径 | 铝合金黑色 | 配套密封圈和一套备用密封圈 |
| 10 | 舱盖 | 110外径1只,90外径2只 | 铝合金加工 | 110为9孔,90为1孔和无孔 |
| 11 | 球罩与固定环 | 1个110球罩和1配套固定环 | 亚克力罩 | 5mm厚度亚克力半球罩 |
| 12 | 防水旋转开关 | 1套 | 红色氧化铝合金 | |
| 13 | 大尺寸穿线螺丝 | 1个 | 红色铝合金氧化 | 用于电源接线 |
| 14 | 锂电池组,充电器 | 1套 | 6s4p | 40A放电能力,2A/5A充电器 |
| 15 | 地面站线盘和线缆 | 1套 | 200米线缆 | 5G wifi版本包括xbox手柄 |
| 16 | 线缆扣件和连接件 | 1铝套1鸡心环1环扣1接线盒 | 不锈钢 | 配合黑色扎带 |
| 17 | 电子舱内部器件 | 1套 | 含深度传感器 | 包含所有内部器件 |
| 18 | 工具 | 1套 | ||
| 19 | 耗材 | 1套 | ||
| 20 | 设备箱 | 1个 |
耗材:海水用白色ab胶x1 (共3个胶头),环氧树脂灌封胶(a瓶和b瓶和一包针筒)x1,螺纹胶 (红色和蓝色1组)x3 ,专业润滑脂x1 ,扎带x20 (白色窄,黑色宽),硅胶线x4 (4种颜色) 热缩管2米x3 (蓝色细,蓝色粗,白色细),干燥剂x1,接线排端子x20, xt60接头(3公1母) pix接线x12根。
工具:胶枪x1,内六角一套x1(3种),梅花起子x1, 一字起子x1,密封圈起子x1,不锈钢扳手x1,剥线刀x1,无刷电机测试仪x1等。
可能不包含的配件:
根据您的订单情况,包装中可能没有以下部分:windows 10电脑,遥控器手柄,地面站线盘,线缆长度有所区别,零件数量不同等。
资源
除了本用户手册您还可以前往http://rovmaker.org查看其他在线文档。
三维模型
本产品提供完善的开源软件和硬件资源,CAD三维文件可以到GrabCAD搜索rovmaker获取,如 果您只需要查看三维模型则不需要下载,可以直接点击在线预览。
在线社区
我们建立了水下机器人在线社区面向水下机器人爱好者和专业工程师等用于交流分享,欢迎访问社区和发帖回复。地址: http://rovmaker.cn
问题反馈
我们在不断地完善产品和开源文档,您一旦发现任何问题可乂陡时反馈给我们以改善问题。您可 以通过任何可获得的联系方式进行反馈,包括在线社区。
软件下载
请访问官方QQ技术群,群文件会更新最新软固件。
概览
除软件配置部分在完成硬件组装后进行,为了理解整体软硬件构架可能会先介绍有关软件。如果您希望尽快搭建,请移至硬件组装部分,第一次配置软件时所有步骤都需要按照手册进行。
介绍
EDGE水下机器人使用Ardusub系统,Ardusub是Ardupilot项目的一部分,是目前较为流行的 ROV及AUV开源软件,源生于ArduCopter。Ardusub是一个安全、操作便捷、高扩展性、全开源的成熟水下机器人系统。ROVMAKER的硬件结合Ardusub成熟的开源软件,建造一台水下机水下机器人从未如此简单。
主要特性
-姿态稳定和精确的反馈控制:基于多轴无人机系统控制,Ardusub固件具有准确的反馈控制。
-定深模式:使用Ardusub支持的深度传感器,Ardusub可以进行厘米级的深度控制。
-航向锁定模式:在没有操作指令的情况下Ardusub默认自动保持航行锁定。
-相机云台:可以通过摇杆控制舵机或伺服电机驱动的相机云台。
-照明控制:可以通过手柄控制水下照明灯的亮度。
-无需编程:用户可以不需要任何编程更改即可匹配大多数框架配置。而且可以通过parameters更改几乎所有参数设置。
-支持多种主流的水下机器人框架布局和电机配置。
-软硬件上具有高度的扩展性和定制化。
-集成姿态航向参考系统(Attitude and Heading Reference System )和惯性导航系统Inertial Navigation Filter (EKF)。并且可以外挂定位和罗盘,市场上的许多GNSS传感器可兼容(赫星here3系列已经测试)。
-可用户自定义和扩展的框架配置系统(可实现任意框架)。
-包括用于控制操作和调参的成熟地面站软件。
-针对MAVLink协议兼容,支持多种开发工具。
-传感器和航行数据纪录。
准备工作
完整的水下机器人系统中包括一些必不可少的部件,以下是一个简单的清单:
-[支持的ROV框架]包含推进器和支持正反转的电调
-飞控,如ROVMAKER的PixHawk
-用来电力载波或者网线通讯的线缆
-安装有QGroundControl(4.2.6以上)地面站的电脑
-USB摇杆或者手柄遥控器
-深度传感器
硬件概览
我们把水下机器人的硬件部分大概分为三类:
-地面站:需要遥控器和电脑
-水下机器人:带有主控制器的ROV本体
-脐带缆:RC和WiFi信号在水中传播十分困难,需要线缆进行通讯,脐带缆通常使用零浮力线和电力载波通讯。
ROV
搭建完整的EDGE水下机器人或其他兼容机器人,Ardusub很高程度的支持多数推进器驱动和配置库,用于多种水下机器人的推进器布置。
飞控
飞控负责ROV的控制,飞控具有板载的陀螺仪、加速度计、指南针用于感知设备的状态。飞控采集传感器信息,控制推进器、灯光、舵机等。借助DroneCode , Ardupilot本已支持非常多的硬件,Ardusub也提供这些支持。在ROVMAKER的PixHawk上已经完全适配和支持。
QGC地面站软件和飞控的连接
一般情况下使用电力载波进行通讯,如果不使用载波通信可以网线直连。ROVMAKER的电力载 波模块支持300米线缆长度的通信距离,可以无电通讯。网线直连的距离受到限制,多芯网线浮力线也比较昂贵。用以上方法配置好IP地址后,无需多余操作,只需打开QGC,即自动连接到装载了Ardusub固件的飞控。
PIX和树莓派的连接
将PIX侧面的microUSB用数据线连接到树莓派任意一USB端口即可。
地面站
ArduSub设计使用QGroundControl (QGC)作为地面站,QGC是一个开源的多平台上位机,适合各种形态的无人机。地面站和ROV通过载波线缆或网线连接到树莓派,通过QGC可以更改各 种参数配置,显示实时拍摄画面。地面站软件为QGroundControl,地面站电脑的性能尤为重 要,会影响传输速度和稳定性,请尽量选择性能较高的电脑。支持以下操作系统:
-Windows 10
-Mac OSX
-Ubuntu 14.04 / 16.04
QGC地面站可以使用游戏手柄或者摇杆控制ROV ,和大多数USB手柄兼容,QGC经测试支持以下遥控器 :
-微软无线Xbox 360/ Xbox One手柄
-罗技310手柄(有线)罗技710手柄(无线)
-北通、机械革命等类Xbox手柄(部分按键无效)
传感器和扩展设备
在基础的IMU和指南针的基础上,Ardusub支持MS5837深度传感器,与飞控进行iic通讯。用于 ”定深模式Depth Hold mode"和深度信息获取。还包括水面GPS (水面下无法使用),但支持超短基线接入,可以实现水下三维定位。
其他设备在进行单独的信息处理后可以和主控进行通讯,因此有极大的扩展可能性。允许用户增加各种传感器和附件,可以更改用户界面进行控制附件,如声纳,三维扫描,液体密度传感器等, pwm输出口更可以用于机械臂舵机的控制。
SOS漏水检测
Ardusub可以读取漏水传感器的信息,漏水时进入自我保护模式。
电池
建议初级用户使用机载电池的方式,地面远程供电系统在以后的版本中会有所更新。电池的选择主要有以下几点:
-电压:电压可以根据电调的最大承受电压选择3.7v的锂电池组,6s是一个不错的选择,能够充 分发挥推进器的性能。(航模电池中,6s中s指电池节数,即6组电池,每组满电为4.2v,额定 3.7v,6S充满电压为25.2V)
-容量:电池容量用mAh表示,数值越大容量越大,一般情况下10000mAh可以支持接近2-3个小时的操作时间。
-放电倍率:在航模电池中,倍率用C表示,表示电池的放电能力。放电倍率和mAh/1000相乘, 即该电池的最大放电电流大小。例如,10C倍率的10000mAh的电池,放电达到100Amps。通常,放电倍率可以选择”15Amps *推进器个数”最佳。
协同计算机
协同计算机一般有两个主要功能:处理并传送视频,通过零浮力线缆和地面站通讯。目前只支持Raspberry Pi 3b作为协同计算机,并需要装载定制系统。
摄像头
树莓派兼容的csi摄像头目前都可以使用,H.264也可以支持。EDGE标配星光级高清1080PUSB摄像头。ROVMAKER推出了可适配的深水双目摄像头,方便部分视觉开发者使用。
推进器和电调
Ardusub设计为无刷电机使用,无刷电机通过电调驱动。所有电调必须能够正反转控制推进器。
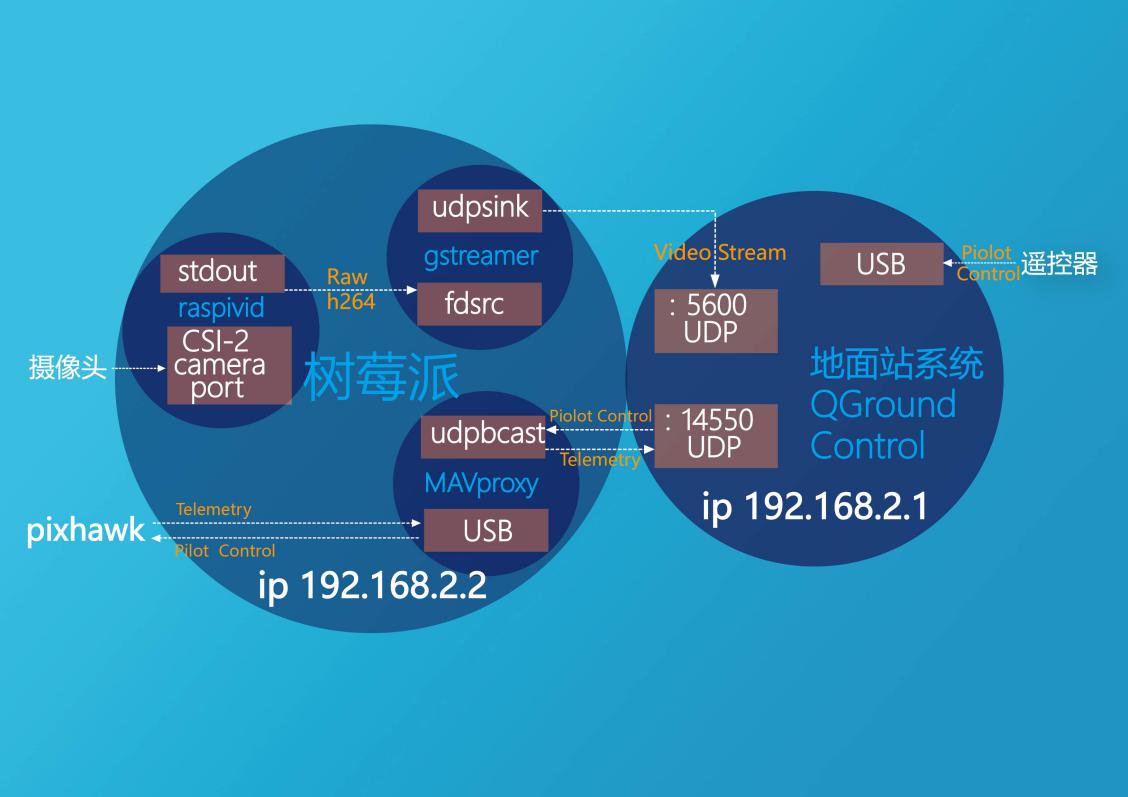
软件概览
Ardusub的软件有三个部分:
-Ardusub固件:是水下机器人飞控的核心程序,负责整体的运动控制。
-QGroundControl:地面站软件。
-协处理计算机系统:树莓派是负责处理视频和通信部分。
以下是系统简图:
支持的布局
Ardusub很高程度的支持多数推进器驱动和配置库,用于多种推进器布置,以下配置为上视图, 绿色和蓝色为相反的正反桨叶。目前支持的框架布局如下:
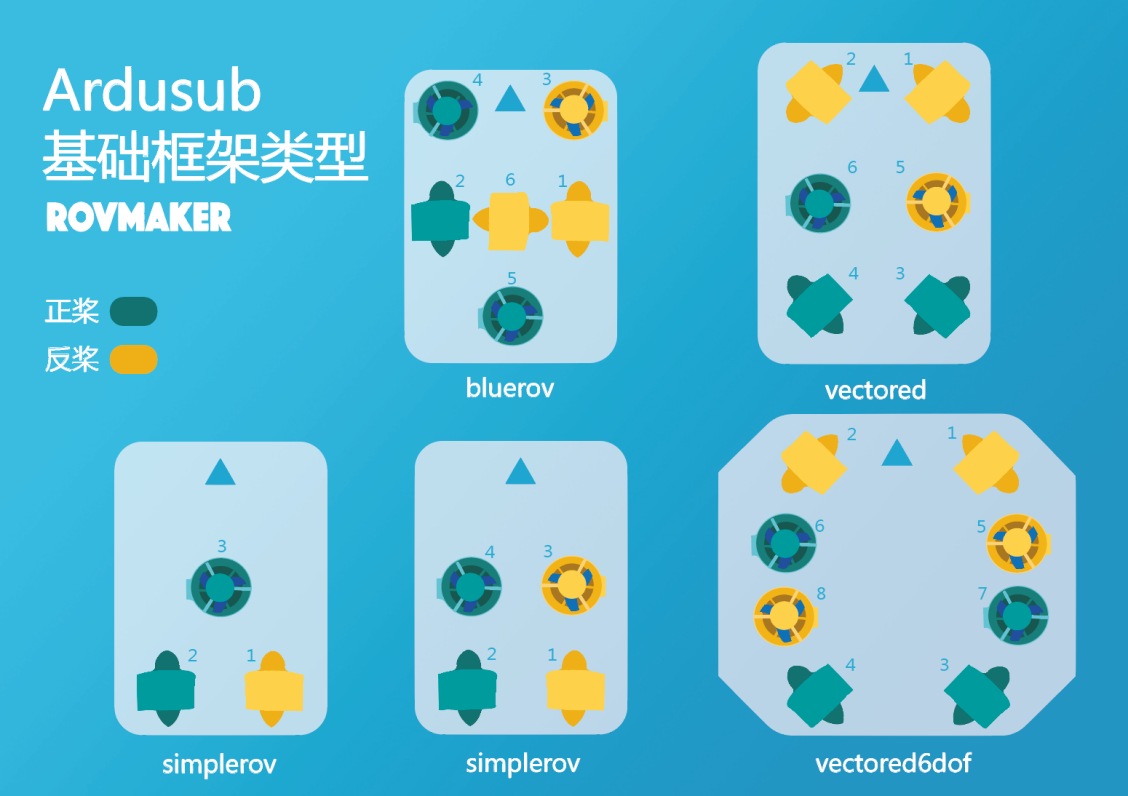
水下机器人的框架配置在QGC地面站中"Frame"一栏。如果你需要自定义自己的框架配置,可以通过设置"parameter"中"FRAME CONFIG"自定义配置,如果更换了布局选择,请重启 PIX设备以启用,详细请查阅开发者章节。
应用场景
ArduSub的强大功能使广泛应用成为可能,从观察级设备到执行级设备都能胜任。无论是ROV还是AUV,其使用场景有无限的可能性,粗略举例:
-水下观察和探索
-考古和记录
-水下摄影
-教育教学
-海洋设备检查
-水体采样和测量
-水下机器人竞赛
-科研及学术研究
硬件搭建
硬件搭建没有固定的操作顺序,建议完全阅读完本章再进行操作,防止操作失误影响产品的使用。 按照实际情况进行安装,不必按照以下的顺序进行。
框架装配
装配框架所需要的部分零件:

图6 装配框部分零件
这一部分最好在螺丝涂抹螺纹胶防止滑脱,在下面的步骤中需要防滑安装的螺丝都需要涂抹螺纹胶于螺纹处,根据自己的情况选择哪些部分需要使用螺纹胶。

框架的装配关系如下图,均为m4x20圆头内六角螺丝,每侧6颗,共12颗。
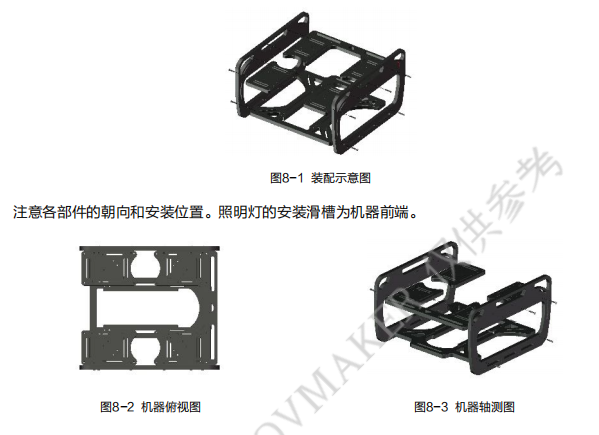
图8 框架三视图
安装推进器和照明灯
分辨推进器的正反桨叶,按照如图的编号和正反桨叶布置安装推进器,正反桨叶按照图中颜色区分。并且对推进器进行对应相同地编号,以防线缆穿过螺丝后忘记对应的编号,编号请勿改变,和接下来的软件配置有关。

推进器的安装位置和方向如下图,使用推进器本身的螺丝固定,垂直安装的两个推进器尖头朝上, 水平的四个推进器注意按照推进器布置图安装。箭头表示机器前端。按照图示理顺线缆:

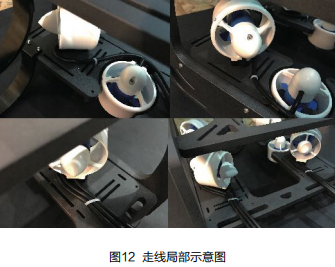
根据实际情况布置好线缆的走向和固定位置

用扎带整齐排布井固定,可以参考下图进行固定和整理:
防水照明灯最好安装在框架内部,在水下可以得到框架保护,使用m4x15螺丝和螺母安装。

根据实际情况可以在前段的两个滑槽中改变安装的位置和角度,安装后的效果:

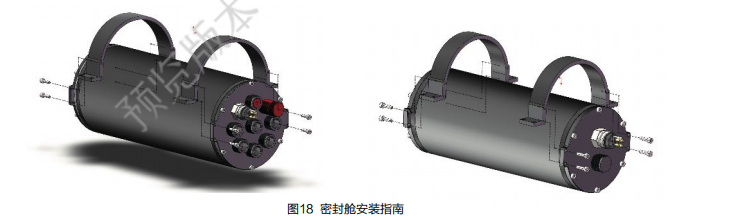
舱体装配
如果使用的是亚克力密封舱需要进行打磨倒角,全铝合金密封舱则不要进行任何打磨,其余步骤相同。注意密封圈的安装和润滑脂的涂抹,亚克力密封舱安装步骤如下图。

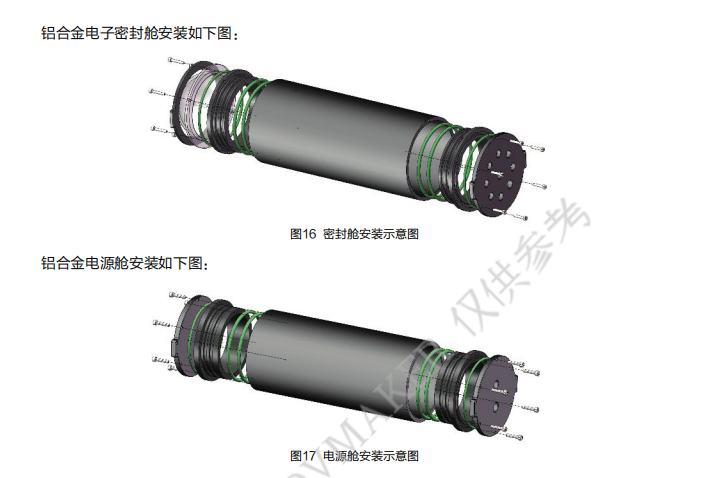
注意选择对应的密封圈和零部件,舱盖的安装部分两侧对称。
两个舱体的半圆形固定环合舱体的貫装位置关系如图,半圆形固定环可以先安装到舱体上。
接线和电子部分
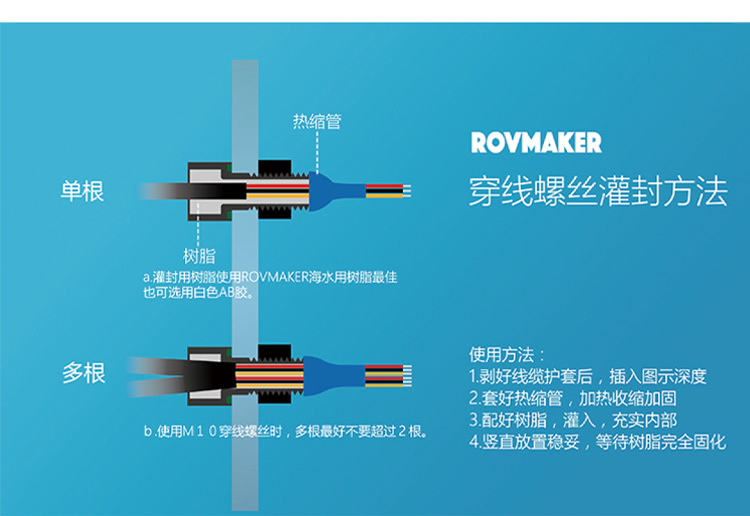
推荐舱盖上的孔定义如下图,根据实际需要可以重新排布,注意排布不要影响其他部件的装配。建议开关,水密接插件,深度传感器的位置不要移动,推荐的布局在安装和使用都是比较好的位 置。注意舱盖上的穿线螺丝螺纹(包括开关,深度传感器,水密接插件等)必须涂抹螺纹胶,并 且一定要拧紧完全压实密封圈,密封圈需要涂抹润滑脂,并且确保表面没有任何灰尘杂质以保证密封效果。使用实心螺丝安装于多余的孔处,预留所需要的扩展孔。

这一部分可以先将舱体放置于将要安装的位置以查看所需要保留的线缆长度,使用剥线器裁剪 线护套,留出足够长的线缆内芯,保证穿过螺丝后能够进行接线。注意线缆的线皮不要磨损破 裂等,会影响线缆的耐压和密封。根据图示2穿线螺丝灌封方法进行灌封。如果可以确定好线 缆长度,灌封可以单独事先进行,也可以在舱盖安装好后进行。
电子舱已经预装,还需要进行检查和接线,接线图如下,在连接电源之前一定要检查好接线防止短路。每个推进器有红黑黄三芯线,红黑为电源,黄色为信号线。在接线时,所有推进器和灯光的红线和黑线分别并连到一起,然后使用接线端子片接到接线排的正负两端,另外所有推进器和 照明灯的黑色负极(和电源的负极共用单独引出,红线不需要)与黄色信号线都需要对应地通过 pix的连接线接到pix图示口(注意是黑色黄色2芯接上,没有红线)。
云台舵机也是红黄黑三根线,但是舵机的电源需要单独连接。如果是继电器版本,从接线排引出正负通过电源模块转换为5v,将5v连接到pix,舵机直接插入pix,此时舵机已经单独供电。如果不是继电器版本,从电源管理的pcb上引出5v接到pix,不需要电源转换模块。如图,pix的侧面接口依次为:主要Main的(RCSB)和8-1,扩展Aux的6-1。其中Main 8-1依次代表Channel8 -Channel 1,为推进器接口,Aux6-1依次为Channel14-Channels9。请在后面的软件配置中注意此顺序编号选择所使用的输出Channel口。

电力系统的接线如下,接线端子排用短路片连接,接线到端子排可以使用端子排连接片防止脱落, 线缆连接或连接片请用热缩管保护。充电和载波线缆的接口定义如图,按照图示标准定义。
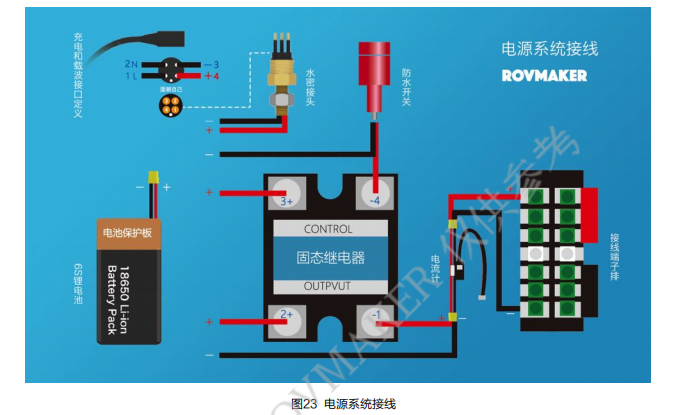
锂电池电源接到电子仓时,按照原定义的1L,2N,3- ,4+把其中N与负极相连,L与正极相连,这 样电源正负极都有两根线芯连接,以增加过电流能力,请勿单芯连接电源接线。这里用到的线缆直接使用水密接插件多余的连接线,并且从大尺寸的穿线螺丝灌封。
如果不是使用固态继电器的版本,请参照下图,也可以参照pcb的背面的标注:
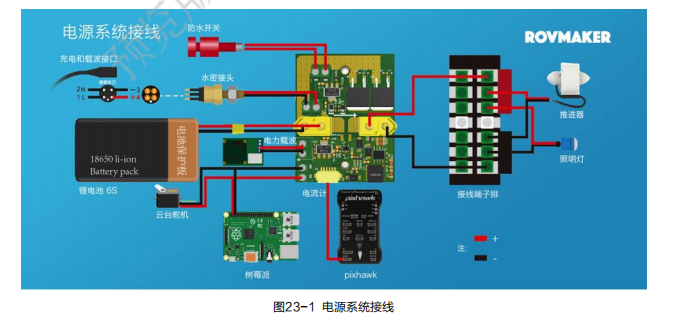
注意非继电器的版本没有单独的电流计,所有电源管理和转换在同一块pcb中进行,电源舱的电源通过水密接插件进入电子舱,然后接入电源电路板的输入中(通过xt60端子)。电源电路板的输出从接线端子排分给所有的推进器和照明灯。其他器件的电源也从此pcb获得。舵机同样单独接5v电源,也可以把5v接到pix的接线排上,舵机通过pix接线排取电。
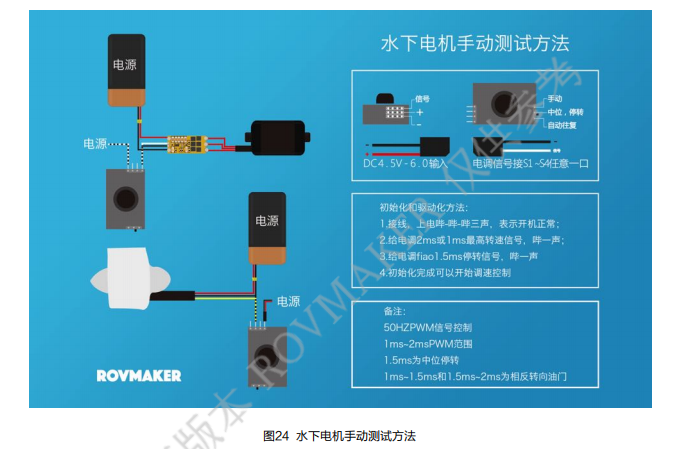
可以对推进器先进行测试,测试方法如下:
总装
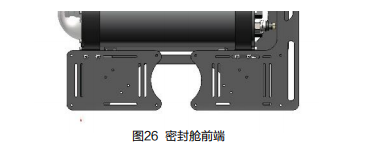
安装密封舱到框架,注意框架和半圆固定环安装部分的上下顺序和螺丝方向,均为均为m4x20圆头内六角螺丝。

密封舱安装到框架的前端是固定位置的,末端是一个滑动槽,以防亚克力舱管有长度的误差。
每个浮力罩内放置两块固体浮力材料,含两个红色和两个白色的浮力罩,通常把两个红色的安装在前进方向位置,以分辨ROV的朝向。每个需要4颗m3内六角螺丝。
配重块安装于最底层,数量和位置需要手动调节L 一般全铝合金需要2块安装于最前端。亚克力 密封舱质量轻,需要更多的配重块,一般为6块,配重块使用m6内六角螺丝。

配重块的数量和安装位置根据实际情况更改,最终使ROV在水中时只有不到一厘米漏出水面并 且姿态平稳,此时ROV具有轻微的正浮力(接近零浮力)。
软件配置
安装 QGroundControl
从http://rovmaker.org相关下载页面或QGroundControl官网,点击链接下载并安装对应操作系统的地面站,下载最新的稳定版本。
设置 Raspberry Pi方法1
树莓派作为Pixhawk的协助处理器,负责处理视频流和控制信号并通过线缆连接地面站。需要给树莓派刷写Ardusub专属镜像。(ROVMAKER官方淘宝店的电子舱已经刷好镜像)
最简单的方法是直接使用树莓派镜像文件通过树莓派tf卡中一个预配置完成的"镜像文件"完成。目前只支持Raspberry Pi 3b。ROVMAKER后续会推出Raspberry4B+NVIDA开发板套餐,方便高端开发者使用。

取出电子舱内树莓派中的tf卡(至少4G容量的树莓派兼容tf卡),使用读卡器插入电脑。
从官网的下载页面下载[最新Ardusub-Raspbian镜像文件]。
下载并安装镜像文件刷写固件工具[ Etcher ],注意选择自己的操作系统。
打开Etcher,选择下载好的树莓派镜像文件(为压缩文件,请勿解压缩),选择所插入的读卡 器,干万不要选择成电脑硬盘或其他可移动磁盘,然后点击”Flash ”等待数分钟后显示刷写成功。
弹出tf卡,重新插回树莓派。

正常情况只需要按照上面的简单的步骤直接刷写镜像文件,完成后直接移至下一节配置地面站电脑。如果你不想通过镜像文件来刷写固件,你可以选择手动一步一步操作,方法请查阅开发者章节。
设置树莓派方法2
也可以利用Win32Disk软件(ROVMAKER官方技术支持群有下载资源),直接刷写镜像,非常方便。
地面站电脑配置
树莓派写入的固件中已经配置IP为192.168.2.2,地面站电脑的IP必须设置为192.168.2.1。在连接之前需要进行以下网络地址配置。
window配置方法:
1.打开地面站基站的电源,用网线联通电脑,进入"网络和共享中心。选择"更改适配器设置"。右键选择连接的适配器,进入属性。

2.在属性中,选择"Internet Protocol Version 4 (TCP/IPv4)",点击属性。
3.选择"使用以下IP地址",输入IP地址为192.168.2.1,掩码为255.255.255.0,再点击确定保存;

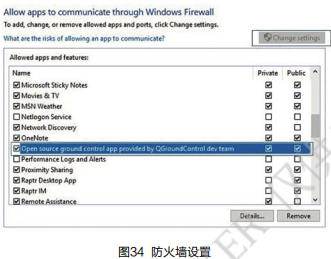
4.防火墙设置,从控制面板中进入防火墙设置,选择”允许应用通过Windows防火墙进行通信”。点击”更改设置”,选择Open source ground control app provided by QGroundControl dev team或QGroundControl。
Linux配置方法:
1.打开地面基站的电源,连接到地面基站网口,点击桌面工具栏中的网络图标,选择"编辑连接"。

2.点击”添加”。
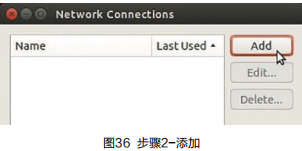
3.选择添加的连接方式为"以太网"。
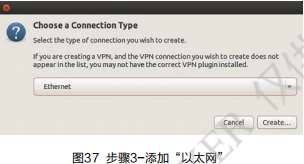
4.在"Device MAC Address "中选择你的连接方如果你直接使用网卡插网线将只有一种选项,如果使用了USB转以太网模块连接,请选择你的转接模块。

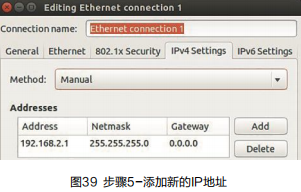
5.点击”IPv4 Settings ”在"Method”中点击添加,输入 192.168.2.1 为IP地址,255.255.255.0 为子网掩码,0.0.0.0为网关。然后点击保存。
Mac配置方法:
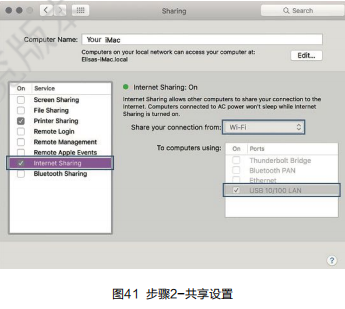
1.打开地面站线盘的电源,连接到地面地面基站网口,进入网络设置,然后选择Configure IPv4中选择手动设置,输入192.168.2.1 为IP地址和255.255.255.0为子网掩码。如果使用了 USB转以太网模块连接,请选择你的转接模 块。如使用无线连接再将默认网关设置为192.168.2.253然后点击确定。

2.进入”共享"设置,选择"网络共享"。
刷写pixhawk固件
通过树莓派刷写Pixhawk的ArduSub固件是最方便的方法,注意树莓派必须已经设置完成。
- 打开地面基站电源,连接至电脑网口,按照之前的方法配置ip地址。
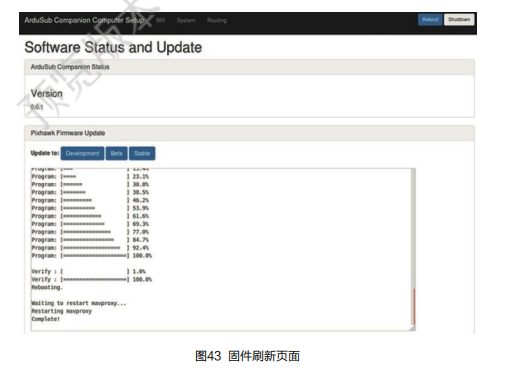
- 打开浏览器,访问http://192.168.2.2:2770地址。
- 输入wifi名称和密码让树莓派可以访问网络,然后点击加入网络。等待网络连接完成。

4.点击"system",然后点击"Update Pixhawk"下面的"Stable'"然后会看到如下:

也可以从本地固件刷写;
等待固件刷写完成,显示如下:
传感器校准
第一次连接飞控到QGC必须进行校准,校准包含如加速度计,罗盘,摇杆等。未经过校准的传 感器会在QGC页面中显示红点以区分,提示需要进行校准。
- 进入QGC的设置栏,选择左边标记有红点的"Sensors”栏。
- 选择飞控在水下机器人中的放置方向(EDGE选择None):
-None正前方平置。
-Roll90 roll方向90度放置。
-其他以此类推,代表在某一轴的放置偏转角度。
- 点击 "Accelerometers" 进行加速度计校准,根据提示进行各位置摆放。
- 点击"Compass"进行罗盘校准,根据提示,在每一轴方向任意旋转,尽量在一个球体范围内,速度不要太慢,一定要保证校准结果落在绿色区间。
- 全部完成后"Sensors"处红点会消失,代表完成。
需要设置的重要参数
有一些重要的参数必须设置,例如测试过程中安全保护需要先全部关闭。
部分安全保护的功能在ArduSub中暂时还不适用。
在设置菜单的Parameters参数页面中找到如下参数更改到如图Disabled(可以在搜索框中搜索 ARMING\_CHECK和BRD\_ SAFETYENAEL快速查找到该参数。Disabled的值通常为0.)

写入参数后必须重新上电,本参数才会被保存启用。
连接手柄和手柄校准
访问http://rovmaker.org网站下载页,下载并安装对应手柄驱动,打开手柄电源或者直接使用 usb数据线连接至电脑。第一次打开QGC并连接手柄或者更换新的手柄,需要校准手柄摇杆和配置按键功能。这将让QGC能够正确匹配摇杆操作并获取摇杆的最大和最小行程范围。
遥控器有四种模式,类似于左右手的区别,模式和校准数据的映射有关。请先选择模式后进行遥控器的摇杆校准。(一般使用Mode1即可,模式改变的是摇杆对应功能,所以更换模式需要重新校准行程。)
最新版本的QGC请按照以下方法校准:
(操作过程中,软件右上角也会有提示,小白点位置即需要移动到的位置。左右摇杆显示可能相反,即显示左摇杆则进行右摇杆的动作。)
- 在设置的Joystick栏中点击"Calibrate"然后点击"Next”。
- 软件会提示移动某一摇杆的轴到最大或最小,按照以下移动校准。
- 显示移动Throttle时:移动右边的摇杆向上/向下
- 显示移动Yaw时:移动右边的摇杆向右/向左
- 显示移动Roll时:移动左边的摇杆向右/向左
- 显示移动Pitch时:移动左边的摇杆向上/向下
- 松手回中,校准完成,显示校准成功。
按键配置
所有提供的按键功能都可以映射到手柄按键,这一步必须操作进行配置,医为井没有默认配置。 每一个按键不仅能配置独立的一种功能,当"shift"按键被配置,相当l可面键盘的"shift"按键, 可以用于复用同一个按键作为其他功能,按住"shift"同时按下设定钟,可触发设定键的"shift”所 设定的功能
在设置的"Joystick"栏目中,可以随意配置每个按键的功能。当按下手柄的某一个按键时,屏幕上对应的按键会高亮显示,然后在高亮的下拉菜单中选怪荔要配置的按键功能。不同的手柄和操作系统按键配置可能不一样,不需要完全和图示中括记的一样。
注意,如果使用罗技或者Xbox手柄,按下手柄的"mode"时,会触发手柄自带的其他功能,如果有其他功能,务必禁用此按键。如果使用Xbox手柄,需要安装"X-input"驱动。

手柄按键的特别功能:
roll_pitch_toggle:按下后,控制机器左右自旋的摇杆功能变化为控制机器左右倾斜(控制潜浮 的两个推进器转速转向的变化)。再次按下此按键后摇杆功能恢复正常。
input_hold_toggle:按下后,会保持摇杆的位置持续输出,摇杆的当前被设置为默认输出,可 以保持摇杆动作,此时仍然可以控制推进器,再次按下后解除,默认中位为停转。
设置电流和电压检测
在"Power”栏中,选择合适的设置。请选择"Analog Voltage and Current",输入所使用的电池 容量,选择"Power Module 90A",电池容量的单位为"mAh”,EDGE的电池容躍为10400。

控制模式设置
控制模式有很多种,例如手动模式,自稳定模式,深度保持模式等。在"Flight Modes"栏default 模式中选择手动模式"Manual",后面依次stabilize'和"DepthHold”模式。
设置好手柄按键后,可以通过手柄技键在几个模式中切换。

目前支持9种不同的控制模式,有些模式只有在传感器使能下可用。同一时间只能在一种模式下。
-1- Manual模式即手动模式,此模式下遥控器的输入被直接输出到推进器,不进行任何自稳定,ROV 总是将手动模式作为开机初始模式。
-2- Stabilize即自稳模式,这个模式在Manual手动模式基础上增加了自稳和航向锁定,始终保 持遥控器所指令的最后航向(保持水下机器人头部所指方向,并不是定点,会自发地一定程 度地左右漂移旋转进行定向),自稳模式有一定的对抗浪涌水流的作用。
-3- Depth Hold深度保持模式,在Stabilize自稳模式基础上,增添了对深度的保持,水下机器 人会保持在遥控器控制信号控制到的最后所在深度。深度保持模式必须要搭载有深度传感器 才能使用。
-4- Position Enabled Modes模式,此模式需要搭载有提供位置信息的传感器,注意GPS在水下无法使用。
-5- Position Hold位置保持模式,会在无航行指令时保持水下机器人所在位置和指向,可以反复设定不同的定点位置。
-6- Auto自动模式,水下机器人会自动执行预先设置的航行任务。应控器指令在此模式下会被 忽略,如果需要干预自动执行的任务,可以用遥控器由disarm锁定,或者更换模式都可以中止任务。
-7- Circle中心点环绕模式,会使水下机器人在指定的中心点以指定直径始终指向圆心画圈航行。
-8- Guided指点航行模式,水下机器人会朝向地面站动态设定的地图位置运动。使用地图中的 "Click to Navigate Here"设定位置。
-9- Aero (Acrobatic)模式,是隐藏的一个秘密模式:杂技模式。这个模式下保持角速率稳定。
相机云台设置
选择”Camera”栏目。"Gimbal Tilt" 用于设置相机云台控制。在"Output channel'选择云台舵 机所插入的飞控pwm输出通道,"Input channel"中选择如"RC8" , "RC1到RC8'和Aux输出 "RC9到RC12"中未被使用的通道都是可以选择的有效输出通道,在"GimbalSettings"中"Type” 下选择"Servo”。

如果需要,可以选择"Stabilize"功能,会开启云台的"auto-stabilization",云台会根据机器的 旋转角度进行自稳定,保持视角方向不变。此选项通常不选,水下控制需要第一视角的画面反馈。 默认的RC输出通道对应功能如下,此处的RC1-RC11代表遥控器的默认通道,需要对应设置选择,同时设置RC通道和Chann el后手柄输出才会对应pix所连接的通道:

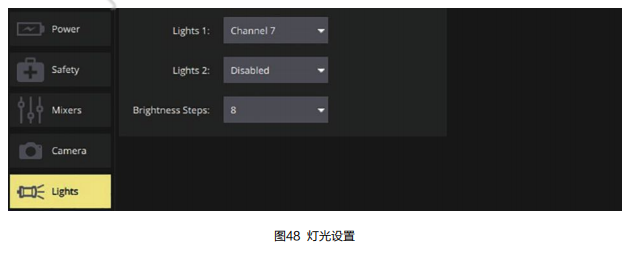
灯光设置
灯光的控制是通过PWM信号控制的,例如连接RCIN9输入,包含灯光控制信号输出。在参数中 找到RCx_FUNCTION,其中x是输出通道,通道需要和灯光输出通道一致,如设置为RCIN9。 例如,照明灯如果连接在channel 7通道设置 RC7_FUNCTION 到RCIN9 操作如下:
设置电机转向
因为桨叶正反和安装方向等,电机的转向需要检查是否准确并更改设置。参数名称为MOT_1_ DIRECTION,用于电机1-8的转向调整,参数数据为normal或reverse。确保其他设置都已经完成,再进行以下步骤的转向调节:
- 控制模式设置为"Manual ”手动模式。
- 按下手柄所设置的Arm按键解锁设备。
- 移动控制前进的"forward"摇杆,检查对应参与前进方向力的推进器桨叶转向是否推力向后,此时水流会向后推,在空气中风向为前进方向的反方向。如方向相反则设置为相反。
- 移动控制潜浮和平移等摇杆,相同地,检查其他推进器方向。如方向相反则设置为相反。推进器的编号如图:

如果你自定义了框架配置,编译上传后,应该不需要此步骤验证。
失效保护
当既定的设置条件被触发会启动失效保护,每个失效保护触发条件都可以单独配置。一些失效保护附加的设置允许自定义调整触发条件,比如最大可接受的压力或温度。
当设置条件被触发,失效保护只会启动一次。在失效保护中,如果解锁检查通过,水下机器人可以被解锁。控制模式在失效保护不阻止更改的情况下才可以被更改。如果失效保护条件被清除, 故障保护动作会再次检测安全设置条件。
举例几种常用的设置条件:
漏水Leak
当漏水检测Leak Detector被识别已经漏水,失效保护条件会被立刻确认。
当漏水保护传感器报告2次识别不漏水,失效保护会被清除。
内部气压 Internal Pressure
当密封舱(WTE)舱内气压被检测达到参数配置中FS\_PRESS\_MAX所设置的压力两次,此设置条件会被确认。
当舱体内部气压小于设置阀值,此失效保护会被立刻清除。
内部温度 Internal Temperature
当密封舱(WTE)舱内温度被检测达到参数配置中FS\_TEMc\_MAX所设置的压力两次,此设置 条件会被确认。
当舱体内部温度小于设置阀值,此失效保护会被立刻清除。
准备下潜
本章介绍下水使用的操作,请在完成所有硬件搭建和软件配置后再下水测试,尤其要检查装配的 密封性和扣件牢固性。
密封性测试方法
请查阅密封性测试套件使用说明,额定300米深度,更深的下潜请进行测试后再操作。
充电与电池使用
EDGE套件包含的充电器为5a充电电流锂电池充电器,可以用于6s锂电池的阮速安全充电。套件 中的锂电池为14000mah容量6s锂电池,电池带有充放电保护和平衡;额定的持续放电电流可以达到40a几乎不发热,给扩展负载预留了很多的空间,可以轻松搭载大电流负载。
由于锂电池已经通过水密接插件连接到电子舱,可以根据水密接插件的引脚定义直接使用电子舱的水密接插件充电。此外锂电池舱可以快速拆卸更换,可以直接对锂电池舱进行充电。
充电时,将充电器一段插入市电,另一端插入锂电池的水密接插件插头公头。
请一定注意充电头的缺口位置对准水密接插件的防反插柱,打火和反接都会破坏接插件或充电器。 充电器的指示灯充电过程中显示红色,充满后变绿。充电时常从无电到满电约一个小时,充电过程中请有人在一旁,禁止持续无人长时间充电,避免事故发生。
一般情况下满电的锂电池可以工作2-3个小时,具体时长依使用情况和负载情况会有所变化。电池和设备在不使用或运输时一定要将水密接插件的堵头插紧牢固,由于接头直接连向电池触碰导电物体会产生危险,尤其不能土堵头接触水,电极会在短时间内氧化损坏。
基站功能和使用
EDGE提供地面通讯基站,打开电源开关,接上网线和卷线盘上的航空插头即可。
调节配重和姿态
请参照硬件装配章节关于配重坎和固体浮力材料安装部分的说明。
负载的增加会改变设备的浮力状态,需要重新进行调节。一般情况下浮力材料不要减少,8块需 要全部安装到位,这一部分主要用于调节姿态并具有一定的浮力调节作用。但在加装负载时需要注意,所安装的负载请事先通过增加浮力使其达到零浮力状态,或安装到设备后共同调节
浮力部分最好于设备的中心上部,配重部分最好于设备的最底部,最终使设备在水中时只有不到一厘米漏出水面并且姿态平稳,此时ROV具有轻微的正浮力(接近零浮力)。
下潜前的检查
水下使用带电设备一定要非常小心,需要反复进行安全检查,包括水密接插件的安全接插(注意使用堵头),安全扣的锁紧。桨叶没有完全的安全保护,请避免旋转的桨叶接触身体。
首先需要检查密封性,在以下情况下需要重新检查:
- 更换密封圈或法兰后;
- 拆卸舱体和穿线螺丝等有关密封的零件后;
- 陆运货船空运等颠簸运输后;
- 长时间未使用后。
检查机械固定:
- 视觉检查所有的螺丝是否安装牢固;
- 推拉各部件检查是否晃动;
- 拧紧有松动的螺丝;
- 检查线缆的扣件是否扣紧,线缆和水密接插件母线的连接处不抗拉,此部分通过u型扣环固定到机器,受力转移到线缆和机器的框架上。
检查水密接插件:
- 未使用的接插件需要用堵头密封好;
- 水密接插件需要拧上锁扣;
- 水密接插件如果产生不顺滑难以插入请涂抹润滑硅脂;
- 注意接插件是否插反。
检查各部分工作是否正常:
- 参照软件配置部分启动并连接地面站软件后,检查摄像头图像流畅程度;
- 按下所设置的手柄各按键功能,检查是否对应并生效;
- 按下手柄所设置的arm按键后,移动摇杆检查电机的转动是否顺畅正确,灯光和云台控制是否正确。
密封圈更换
EDGE所使用的氟胶密封圈具有优异的性能,但密封圈在长时间使用后仍然需要更换。
建议在每200小时使用或半年后进行更换,更换后注意密封圈需要均匀涂抹润滑硅脂,保证密封 圈表面和安装处没有任何杂质和灰尘。
回收
下水后的回收因具有脐带缆会更加便捷。回收过程如不需要进行操作,可以锁定电机并关闭灯光节约电源。拉动线缆立行回收,线缆整齐绕到线盘上。为了防止缠绕和阻挡可以浮到水面后再收线
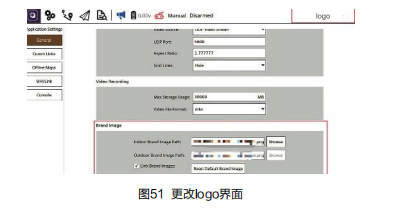
更改logo
如下图,点击Q图标,在Genera栏中,可以更改logo图标,建议用png格式的图片文件。
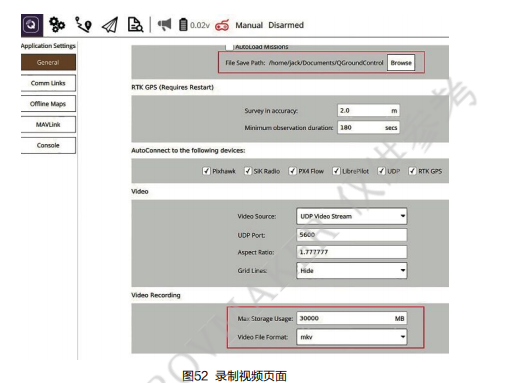
录制视频
如下图,点击Q图标,在Genera I栏中,选择录制视频在电脑中的保存位置,设置录制视频的最大存储空间和视频的保存格式。切换到摄像头页面,右下角有红色的录制图标,点击即开始录制, 再次点击停止录制。
疑难处理
运动混乱方向不对:
检查推进器的接线是否按照顺序定义接到对应的pix口。确认遥控器摇杆的模式和校准过程,可能手柄设置的方向不正确。检查推进器的转向是否设置正确。检查手柄的roll_pitch_toggle功能是否被设置且被按下。
摇杆没有移动但是电机在旋转:
检查parameters中的RCx_TRIM是否设置为1500中位。手柄是否有按键设置为input_hold_toggle并且被按下。
上电后电机直接开始旋转:
确保此时在Manual控制模式。如果在自稳或定深模式,机器会根据自己的姿态驱动电机进行纠正,如果放置于地面,会不断加快转速。在地面测试时需要使用Manua控制模式。也有可能是手柄没有校准好,除了重新校准手柄外,也可以在QGC手柄设置中,拉大指数曲线的数值。
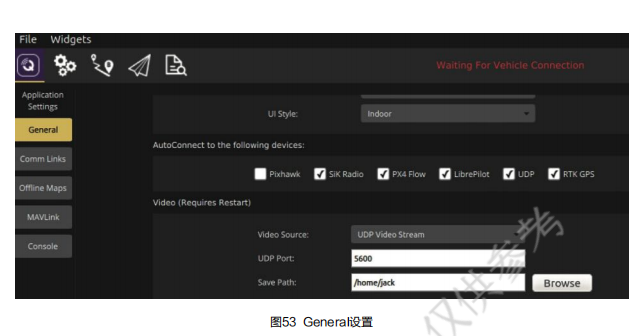
Waiting For Vehicle Connection:
确认机器所有的接线和电源状态,检查ip设置和防火墙设置并且地面站电脑仅连接到地面站的网络中。进入Q图标中General设置,在Autoconnect to中检查是否勾选了pix,是否选择了UDP 并且设置为5600。
在电脑的终端命令行中输入以下命令并回车:
ping 192.168.2.2
如果没有响应,说明网络连接存在问题,检查ip设置和和防火墙设置,观察树莓派的网口或电力载波的网口灯光是否闪烁。如果没有闪烁,重新确认接线。
树莓派和pix的数据线确认插好,且数据线是4芯能够传输数据的线,最后重启和重新上电。
相机云台无法移动:云台舵机需要单独的5v供电,直接插到树莓派是没有供电的,需要外接并且和pix的负极共地。检查舵机云台的设置和手柄对应按键。
指南针罗盘不准或晃动:指南针很敏感并且会受到周围磁性影响甚至是钢筋混凝土。在户外进行校准会获得最佳效果,远离建筑物或者钢架桥梁。在室内校准时,可以把parameter中 COMPASS_OFS_MAX增加,指南针会受到影响尽管影响会不准确但应该是平稳的。
在校准时按照以下步骤:
- 开机上电,等待十分钟使传感器预热;
- 确认 parameter中 INS_GYR_CAL的值设置为Never;
- 进行加速度计校准;
- 进行罗盘校准;
- 重启设备。
QGC 提示No IO Thread Heartbeat:
此提示说明pix和pix的tf卡数据读取或写入存在问题,插拔pix内的tf,检查卡是否插好。如未解决, 可以在safety页面把Logging和其他安全检查设置disable。如果tf卡的确存在问题,可以在保存配置文件之后取出,在电脑上把卡进行格式化。
配置文件
在参数配置中设置必要的和自定义的配置项,这些参数被存储在飞控中,每次上电都会自动读取这些参数。大多数参数都可以在QGroundControl的Vehicle Setup页中修改,而不需要到 parameters更改数值。部分参数需要重启飞控后才能生效,大部分不需要。
保存和导入
全部的参数配置都可以被保存为一个text文本文件,也可以用文本文件导入覆盖原先的配置文件, 这个text文本文件可以看到所有能够被配置的参数,这是一个非常方便的功能.可以用于错误排查和共享交流配置文件。
使用QGroundControl保存和导入配置文件,进入Vehicle Setup Page页面, 点选Parameters 菜单。选择Tools,在下拉菜单中选择Save to file或者Load from file。
刷新
一些配置参数是动态的,会在指定的情况下自动改变.重新载入获取当前的参数点击Refresh按键。
重置
所有的参数配置都可以被擦除恢复默认,点击Reset all to defaults (ArduSub V3.5+ )。

配置文件
默认的推荐配置文件让参数配置更加容易,这些配置文件不会更改加速度校准,指南针校准,电机转向(accelerometer calibration, compass calibration, motor directions ),但是会改变遥控器校准数据,PID值,灯光和其他外围参数与数据。
固件说明:
有三种不同的固件,比如:
-Stable (3.4):稳定版本,功能暂不齐全,推荐使用。
-Beta (3.5-rc1):预览版,用于正式版本发布前的测试和bugfix。命名的后戳为-rcx,rc代表 release candidate,x 代表编号。
-Development (3.6-dev):开发版本,此版本经常更新,此版本仅用于开发者测试。后戳为-dev 最新的ArduSub稳定版本为3.5,推荐使用稳定版本。更新的版本请到ROVMAKER官网查看相关下载页。
查看正在使用哪个版本
刷新参数以查看飞控中已经安装的固件版本。当参数刷新后,飞控会通过STATUSTEXT发送软件版本信息。通过点击QGroundControl中的Messages图标查看信息。
如图:
在Summary中也可以查看正在使用的版本。

更新
强烈建议更新固件之前先保存配置文件。通过QGroundControl更新固件,在Vehicle Setup Page中点击固件栏。
使用USB数据线把Pixhawk直接连接到电脑。当检测到Pixhawk连接到电脑,QGC界面右边会显示一个固件选择栏,选择”ArduPilot Flight Stack"然后点击"Advanced Settings",选择下拉菜单中的"Custom firmware file…”。点击右上角的"0K”,然后选择固件文件,(文件名例如 "ArduSub-v2.px4")。
注意:在最新版本QGroundControl中可以直接选择"ArduPilot Flight Stack "中的S ub-Ardusub V3.5直接刷写Ardusub到Pixhawk,要求电脑有网络连接。

点击右上角的"OK"开始刷写,—段时间后在状态栏中可以看到以下成功信息。

开发者选项
如何获取源码
ArduSub源码部署在git库中,包含于ArduPilot内。最好的获取源码方式是复制这个库。
git clone https://github.com/ArduPilot/ardupilot.git (https://github.com/ArduPilot/ardupilot.git)
也可以从https://github.com/ArduPilot/ardupilot.git下载zip的源码压缩文件。
编译
编译分支,首先cd ArduSub进入目录,然后使用以下格式命令:
make \[board type]
例如,build Pixhawk 1 :
make px4-v2
通过输入make (不加后缀,仅输入make)可以查看可选的板子类型。
上传
上传代码到PixHawk或其他类似支持的飞控,添加-upload至build命令,例如:
make px4-v2-upload
需要用USB直接连接Pixhawk才可以完成。不过如果用树莓派网线转接连接,可以通过树莓派上传代码。
运行
当上传完成,代码会立刻运行。对于基于Linux的飞控,必须通过运行脚本开始运行。请查看对应飞控的文档。树莓派也被设置好开机自动连接到飞控。
自定义框架配置
代码包含一个六自由度的推进器库,这使得建立自定义的推进器布置框架变的非常简单。推进器库文件对每一种布局预设都建立在推进器上层定义,类型如下:
AP\_Motors
|----AP\_MotorsMulticopter
|----AP\_MotorsMatrix
|----AP\_Motors6DOF
增加一个新的推进器布局预设需要添加自定义的推进器配置到[AP\_Motors6DOF.cpp]0找到 以下代码行,添加你的自定义框架配置。框架配置会从FRAME\_CONFIG载入参数引导,你只 需要更改这些参数到CUSTOM来定义自己的布局配置。
case AS\_MOTORS\_CUSTOM\_FRAME:
// Put your custom motor setup here
简单地说,每只推进器的运转都需要被定义。定义的原则即该推进器在六个自由度上的推力分配 (可以理解为在每个轴上的分力贡献),这些定义可以在AD\__Motors6DOF.cpp中查看。以预设的框架配置文件作为参考会更加容易理解。以下是车架配置参数示例(均在机器坐标系下):

手动配置树莓派
安装Raspcian和设置IP地址
从[raspberrypi.org]下载树莓派Jessie-Lite镜像文件,根据官方网站上的操作说明安装到SD卡 中。
- 修改/boot/cmdline.txt中的文件,添加"ip=192.168.2.2"到最后一行。如下:
dwc\_otg.lpm\_enable=0 console=serial0,115200 console=tty1 root=/dev/ mmcblk0p2 rootfstype=ext4 elevator=deadline fsck.repair=yes rootwait ip=192.168.2.2
- 新建一个空的新文件夹/boot/ssh 。
- 插入SD卡到树莓派,用网线把树莓派直接连接到电脑,然后上电。
连接到树莓派
电脑需要设置IP地址为192.168.2.1,请到后面章节查看设置IP地址的方法。
以下的操作步骤都需要从终端操作,必须先通过SSH连接到树莓派,可以使用PuTTY或者Mac 终端操作。树莓派的默认密码是raspberry。
ssh pi@192.168.2.2
连接到网络
树莓派需要网络连接下载必要的文件,如果你使用Mac并且已经设置好网络共享 [ Internet sharing] 就可以开始下面的操作了,否则,需要用以下方法设置树莓派的WiFi 连连接。
WiFi
通过运行 /etc/wpa_supplicant/wpa_supplicant.conf 编辑。
sudo nano /etc/wpa\_supplicant/wpa\_supplicant.cor
在文件的末端增加一行:
network={
""ssid="yournetworkname"
""psk="yournetworkpassword"
"" }
按下CTRL+O保存编辑,然后按下CTRL+X退出编辑。然后重启无线连接:
sudo ifdown wlan0
sudo ifup wlan0
检查网络连接代志:
ping rovmaker.org
命令行配置
首先运行raspi-config扩展文件系统并使能摄像头。
- 在命令行运行
sudo raspi-config。 - 选择"Expand Filesystem",点击"Ok"
- 选择"Enable Camera",选择"Yes",然后"Ok"(如果主菜单内没有"Enable
Camera"选项,可以在"Interfacing Options"下找到。)
- 选择 "Finish" 和 "Yes" 重启。
接下来,升级最新的软件并安装,软件用来运行ardusub脚本,[companion repository]从树莓派下载脚本。
使脚本可执行:
chmod +x setup.sh
运行脚本
./setup.sh
所有的软件安装和设置大概需要等待90分钟,脚本运行结束后,重启树莓派:
sudo shutdown now -r
摄像头连接好,树莓派重启后,会自动打开视频流并且直接连接到PIX,如果遇到任何问题,尝试重新运行一次脚本文件,防止某些包没有被检索到。
运行Mavproxy和视频处理服务
Mavproxy和视频处理服务可以在"screen"看到输出和错误提示,打开树莓派SSH终端,运行以下命令:
sudo screen 一r video
sudo screen 一r mavproxy
退出并结束进程,按Ctrl-C。退出但不结束进程按Ctrl-A,然后按D来"detach"。
备份镜像文件
在Mac或Linux中,首先用diskutil查找SD卡的磁盘名称。
diskutil list
找到输出中的SD卡,在Mac上看上去应该像这样/dev/disk2在Linux上看上去像这样/dev/sdb.
Mac:
sudo dd bs=4m if=/dev/disk2 | gzip > raspbian-ardusub.img.gz
Linux:
sudo dd bs=4M if=/dev/sdb | gzip > raspbian-ardusub.img.gz
按下Ctrl-T查看运行状态,需要等待很长一段时间。
恢复镜像情查看上文利用镜像文件配置。
