单自由度夹爪机械手产品手册
简介
本产品是一款高性能防水机械爪,内置高性能BLDC无刷行星减速电机,高集成有感驱动,控制简单,使用高效便捷。可搭载不同平台应用于各类恶劣工况进行作业。 本产品采用一体铝合金外壳,T6铝合金爪头,外观简约,坚固耐用。独特密封设计,搭配高精度不锈钢传动轴,可实现水下300米作业。自适应力矩夹紧自停,操作简单方便。产品配备有过流保护,欠压/过压保护以及防反接保护,安全系数高。产品具有安全高效,操作简单,工作稳定,性价比高等诸多优点。适用于水下勘探、教学科研、科技竞赛等场景。通过PWM信号控制机械爪内部电机正/反转,实现爪头的张开/闭合。

特性
- 高可靠性-为多家知名水下科技公司代工,多年不断改进优化
- 超长寿命-超强加硬丝杆
- 兼容性好-PWM信号控制,兼容主流开源水下机器人
- 高功率密度-选用高端电机,更小体积更大抓力
- 应用灵活-可更换定制夹爪,满足不同的应用场景需求
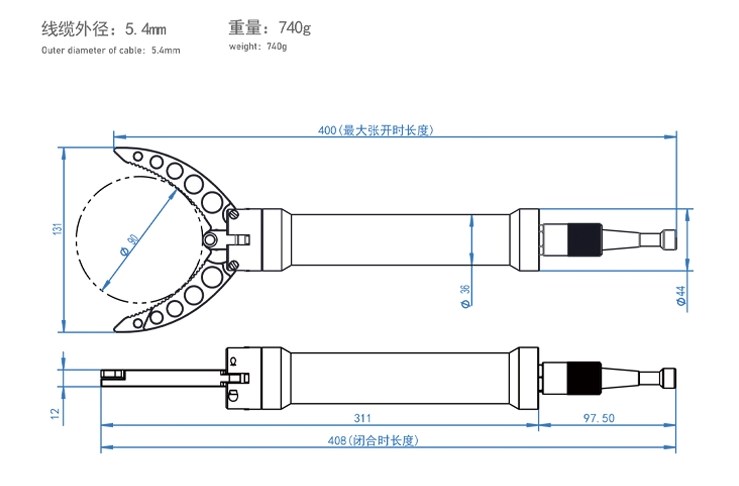
技术参数

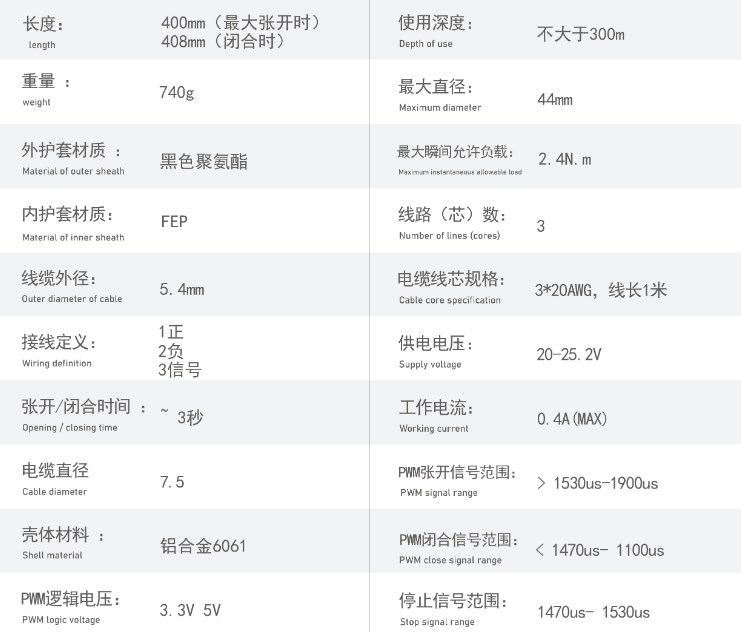

规格
接线定义
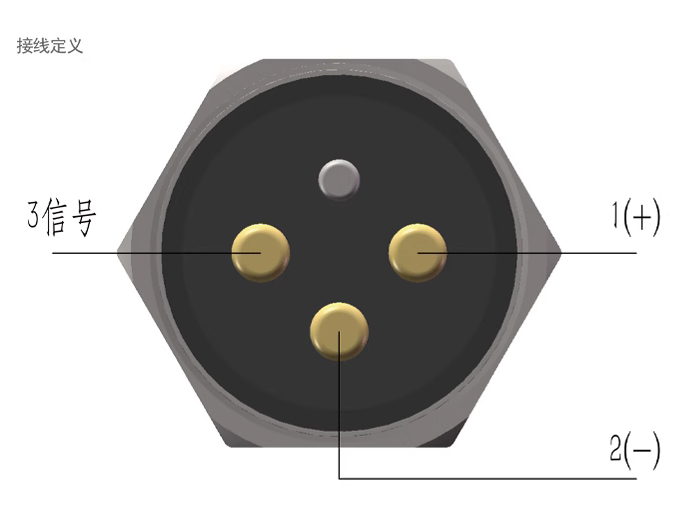
注意:机械手的线序不能以颜色区分,只能以线标区分,不同批次的颜色会有改变
配置方法
机械手供电(20-25.2Vdc) GND需与Pixhawk供电共地
步骤一 接线
机械手的信号线连接到Pixhawk 的 Aux Channels 1~3
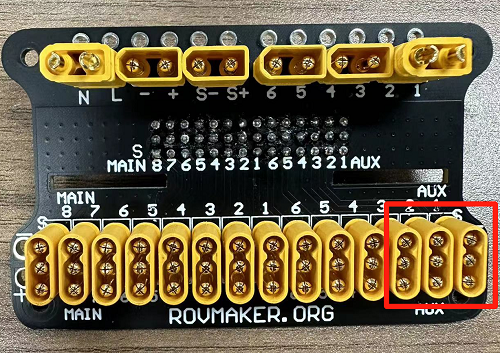
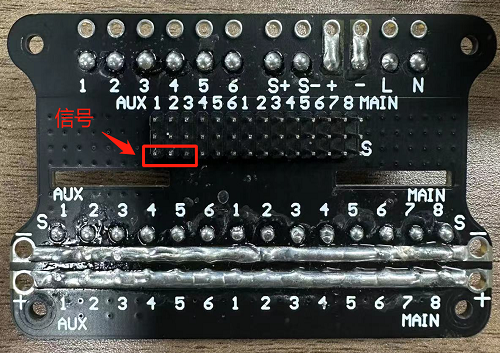
插入对应的信号口
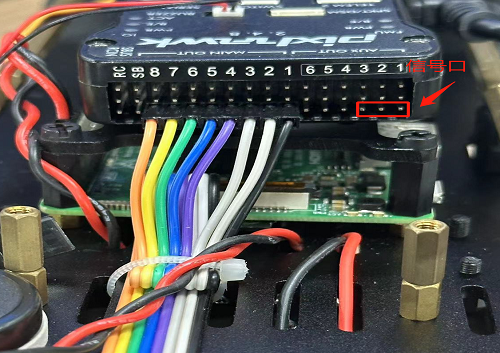
图为连接的AUX Channel1口
此时接线完成。
步骤二 上位机配置
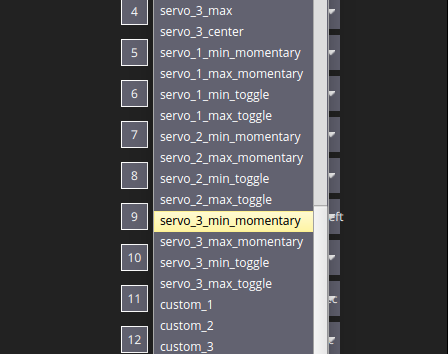
在QGC的Joystick设置中选择需要配置的按键功能为:
servo_X_max_momentary (按下按键后机械手张开)
servo_X_min_momentary (按下按键后机械手闭合)
·此按键功能只支持AUX Channel 1~3
此时AUX通道输出PWM的高电平持续时间默认为:
servo_X_max_momentary(1900us)
servo_X_min_momentary(1100us)
对应机械手的张开和闭合信号
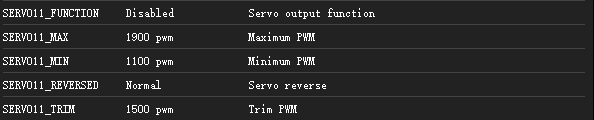
如机械手在测试时张开或闭合存在不连续现象可在配置的PWM输出参数中修改
参数为
Servo_MAX 1800 Maximum PWM
Servo_MIN 1200 Minimum PWM
图为配置AUX Channel3
例:机械手连接到Pixhawk的AUX Channel3 选择对应按键功能为servo_3_min_momentary(按键闭合) 选择对应按键功能为servo_3_max_momentary(按键打开)
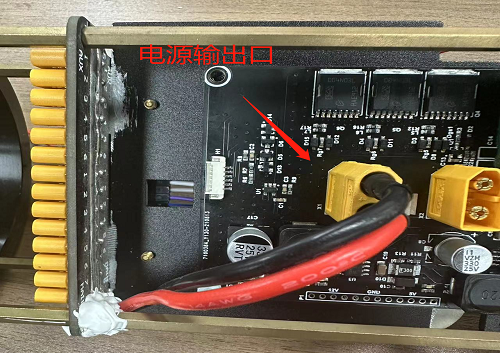
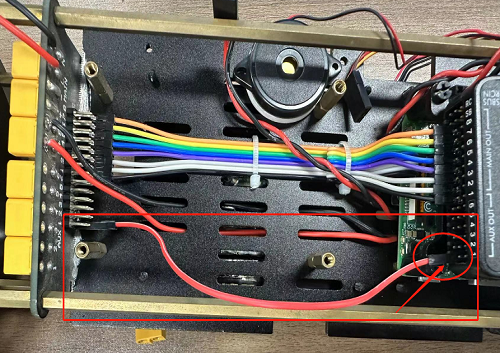
步骤三供电
给分线板供电,插入电源管理板的输出口